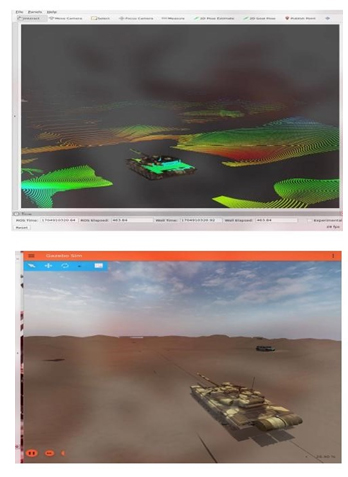
Simulator is developed to test and validate the autonomous behaviours of unmanned vehicles across multiple domains:
(i) Comprehensive Environmental Modeling: Simulates complex environments including desert, underwater, surface water, and aerial scenarios. Features weather conditions like typhoons, snow, and fog across various times of day and night.
(ii) Scenario and Vehicle Modeling: capabilities, allowing users to simulate a wide range of obstacles and environmental conditions
(iii) Intuitive Control Systems: Includes user-friendly interfaces for scenario customization, facilitating extensive testing and validation of autonomous navigation technologies in diverse operational environments.
(iv) Developer Documentation: The simulator has extensive developer documentation for customizing the simulator according to final user needs.










Disclaimer : The information provided here is indicative and for outreach purposes only. Users are requested to confirm the date, time, terms & conditions, and all relevant details directly from the DefProc (Defence e-Procurement) Portal or other official websites. No queries in this regard will be entertained.


